Research
My overarching research vision is to develop novel approaches for optimization using non-classical computing. To this end, I take a two-pronged approach in research: algorithmic theorization and analysis/testing. Combined, I hope to build a more nuanced comprehension of the field and have a wider reach with my work.
McMahon Lab
Due to the computational inefficiency of certain problems including vehicle routing problems with time windows (VRPTWs) or image classification, it can be viable to approach these problems using non-traditional means such at the coherent Ising machine (CIM) or other physical solvers. Our goal is to benchmark unconventional computing algorithms against traditional frameworks, showcasing increased energy efficiency in these domains.
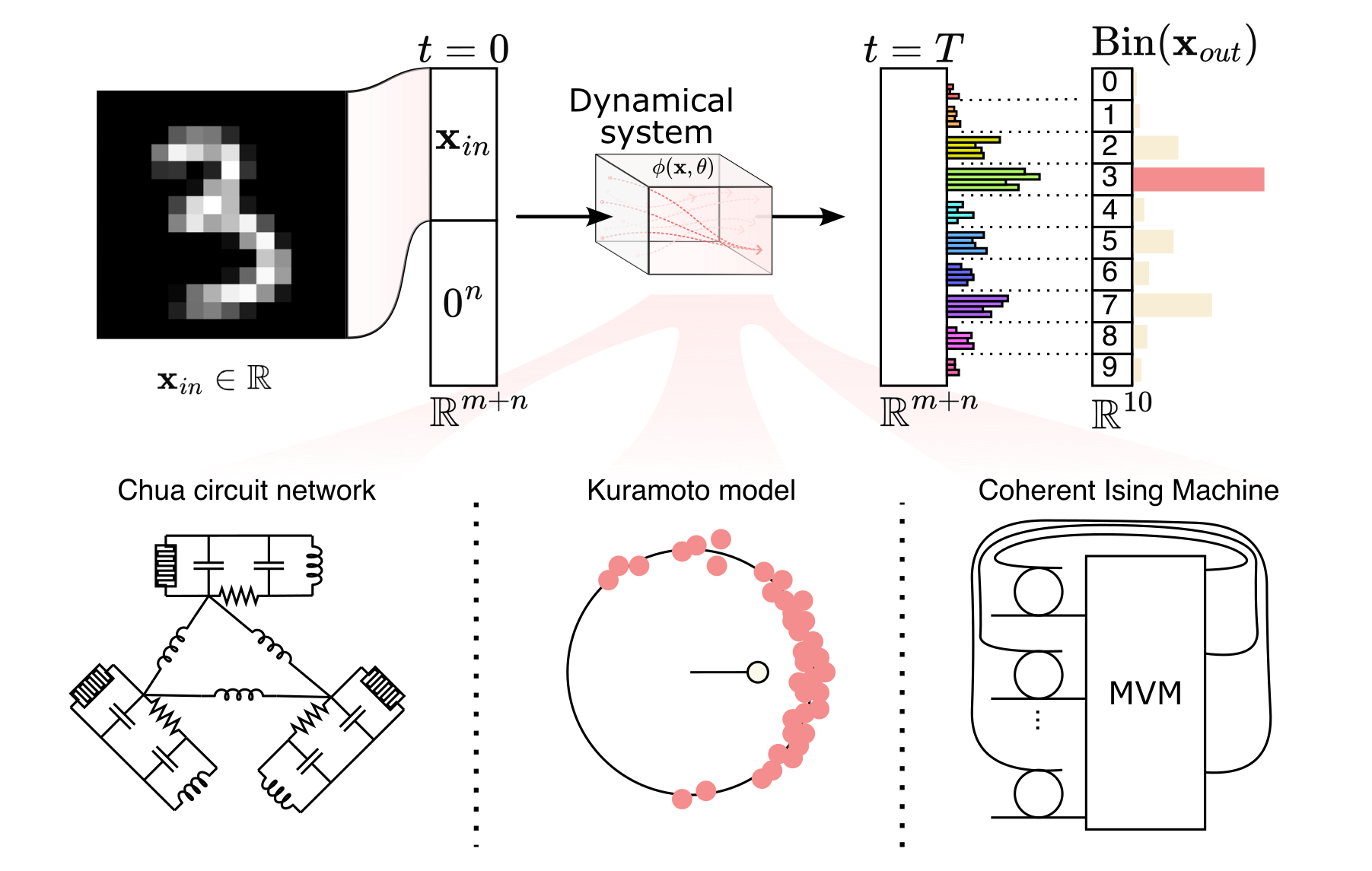
Nonlinear Dynamical Networks as Neural ODEs for Image Classification
Coupled oscillator neural networks for image classification tasks including CIFAR-10 and MNIST. AVAILABLE UPON REQUEST.
View Project
cim-optimizer
Open-source repository that simulates the dynamics of various CIM solvers.
View Project
Benchmarking the Coherent Ising Machine for Vehicle Routing Problems with Time Windows
Testing various VRPTW implementations on simulated CIM code for large-scale instances. AVAILABLE UPON REQUEST.
View ProjectComputational Imaging Lab
By combining ideas from machine learning, signal processing, optics, computer vision and physics, better imaging systems can be constructed via the co-design of optics, algorithms, and high-level tasks. To this end, I have worked on the creation of synthetic datasets for realistic physical biases in hardware imagers, along with performing model evaluation for various computational imaging tasks such as image classification with optical hardware.
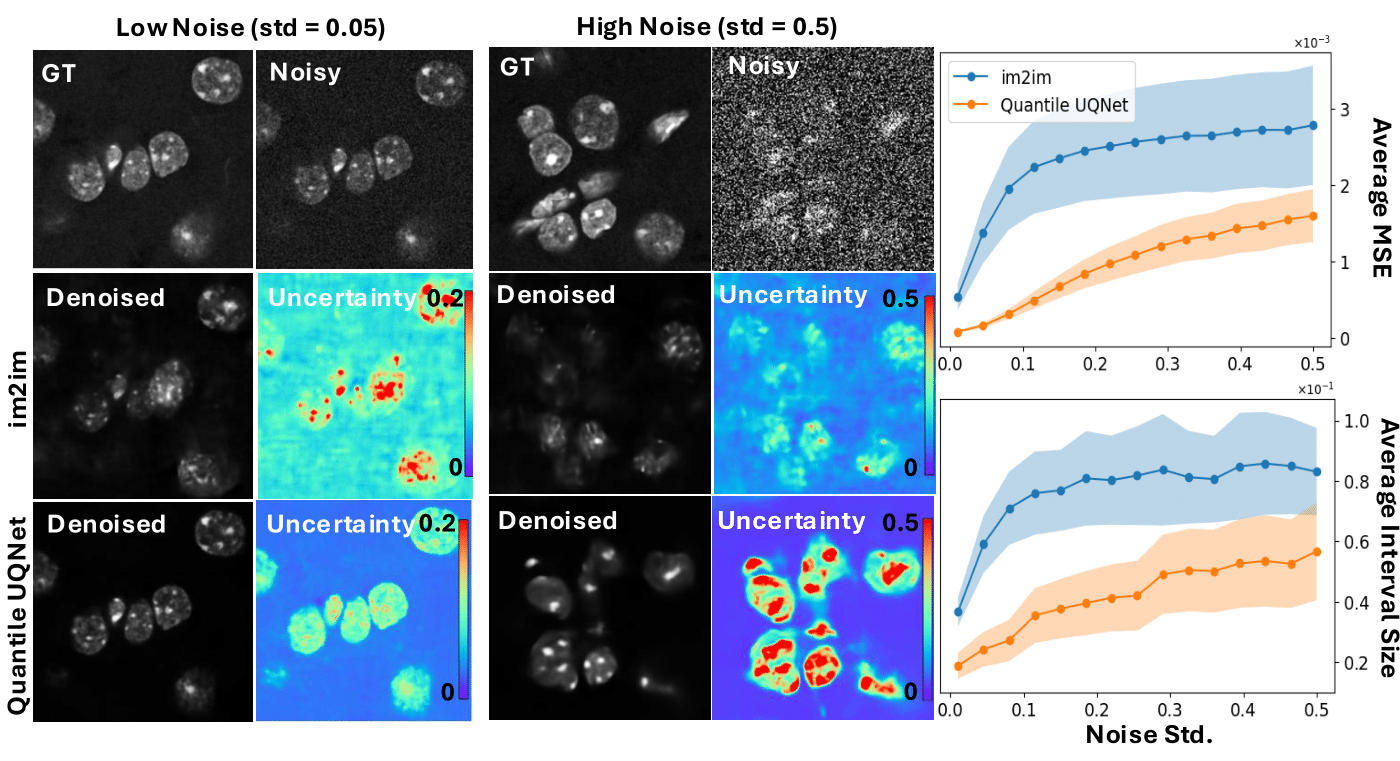
Quantile UQNet: A Conformal, Nonlinear Scaling Model for Uncertainty Prediction
We introduce Quantile UQNet, a conformal deep network for biomedical-style image denoising that uses nonlinear quantile scaling to produce tighter, signal-independent uncertainty bounds with the same statistical coverage.
View Project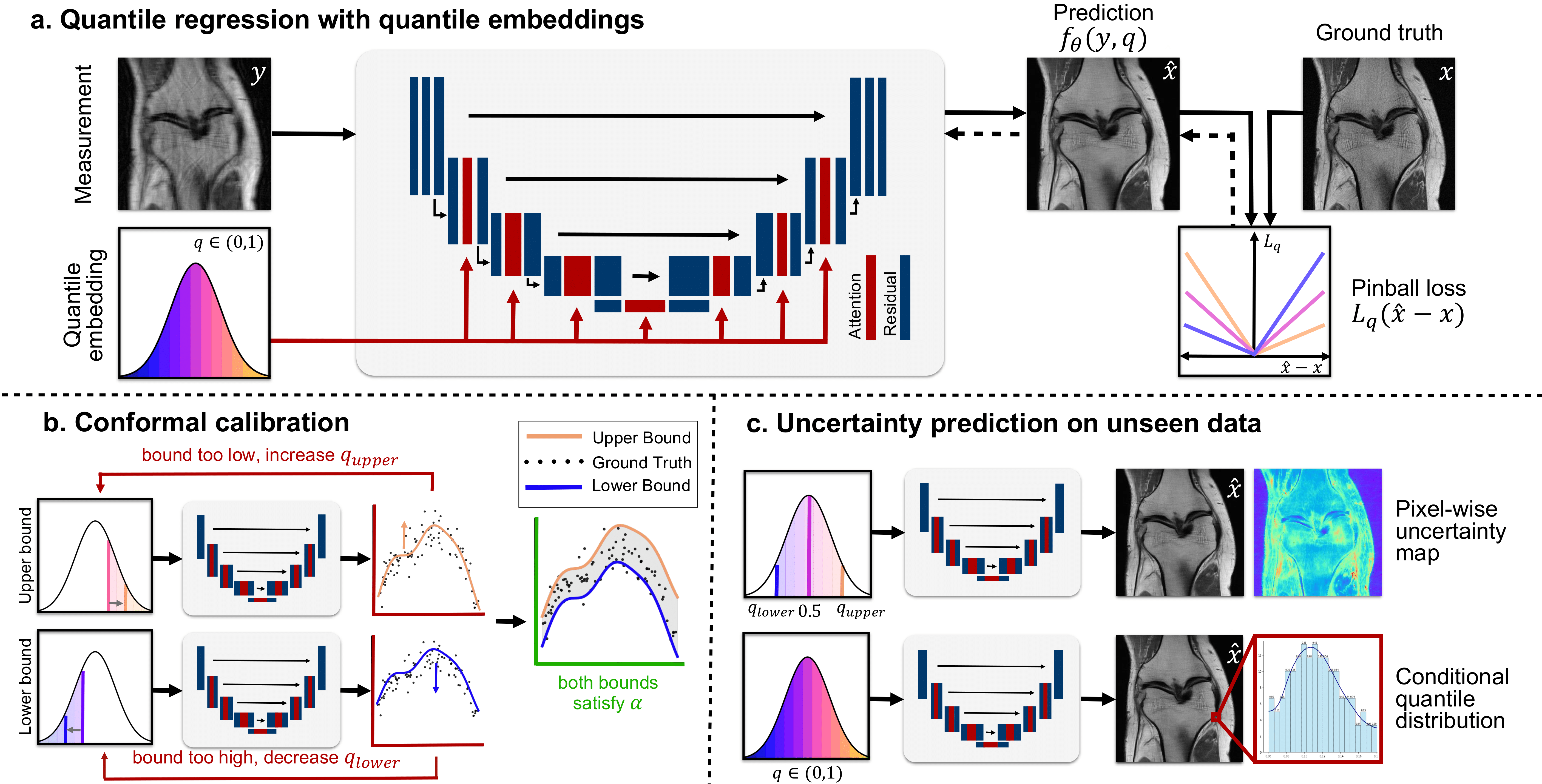
QUTCC: Quantile Uncertainty Training and Conformal Calibration for Imaging Inverse Problems
QUTCC is a quantile-embedded U-Net with nonlinear, non-uniform conformal calibration that delivers statistically valid yet tighter uncertainty intervals, reliably flagging hallucinations, and improving trustworthiness across denoising and compressive MRI reconstruction.
View ProjectHelbling Lab
Aquatic environments are challenging to monitor, motivating millimeter-scale bio-inspired robotic swimmers that use fin-based propulsion to maneuver through confined natural and engineered waterways (e.g., streams, lakes, pipes) while enabling studies of fish-locomotion hydrodynamics. To contribute to this body of research, I introduced tracking software and developed control algorithms for millimeter-scale robotic swimmers dubbed DanioBot.
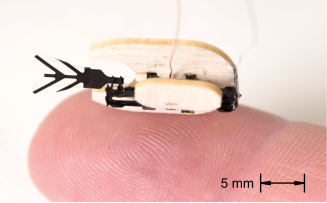
Design of a swimming microrobot powered by a single piezoelectric bender
DanioBot is a millimeter-scale piezoelectrically actuated microrobotic fish that uses a single bimorph bender to swim up to 2.84 body lengths per second.
View ProjectInstitute for Creative Technologies
Humans tend to leverage various heuristics in their optimization of dependent choices. We apply various neural networks along with older statistical models like logistical regression to capture this behaviour using cognitive biases such as loss aversion and anchoring.
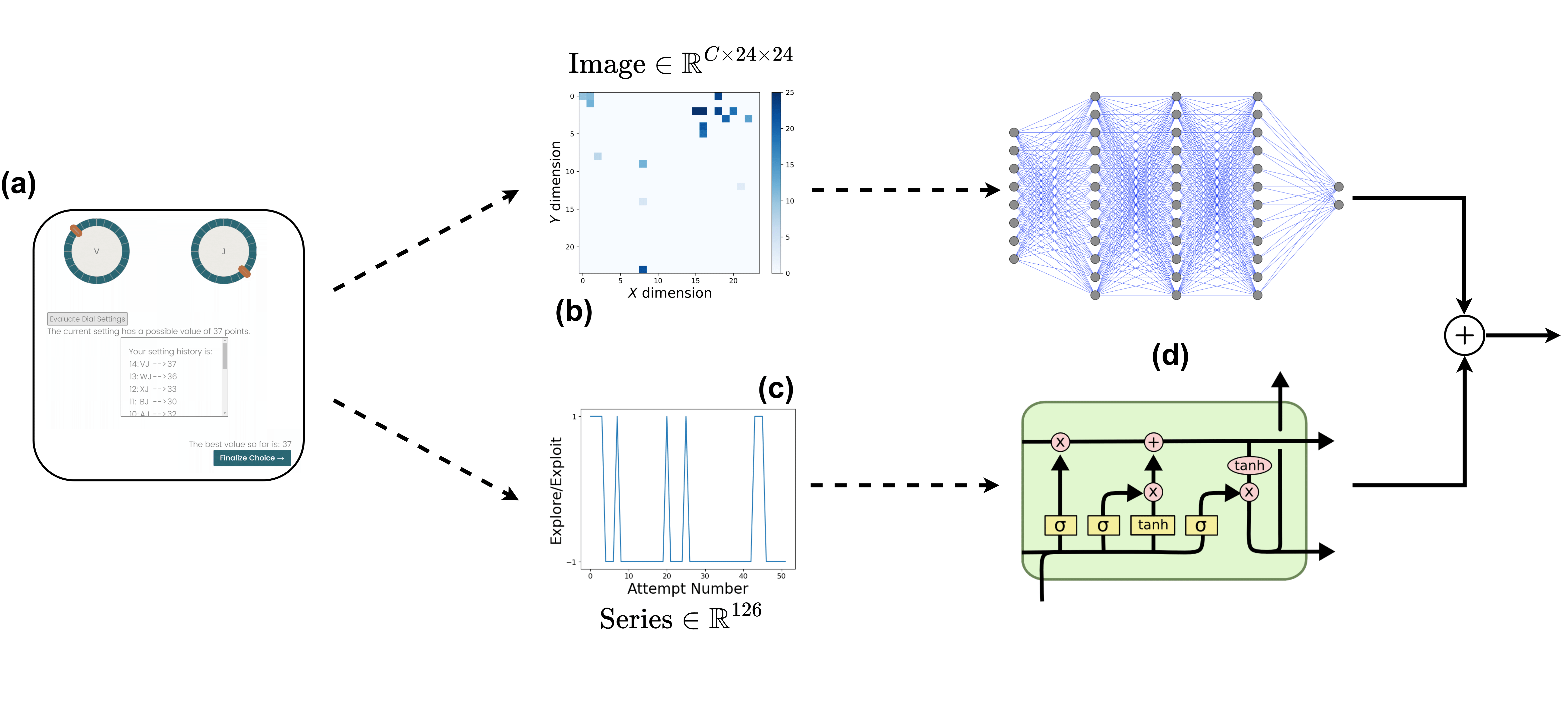
Detecting AI Assistance in Abstract Complex Tasks
We frame detecting AI assistance as a classification problem and show that by preprocessing abstract task data into four image-based representations plus a time-series encoding of users’ exploration/exploitation, standard deep learning models can accurately detect AI aid.
View Project.png)
An Experimental Method for Studying Complex Choices
To better understand how humans approach complex decisions, we introduce an experimental paradigm that involves rotating dials that control the dimension of a nonlinear problem, along with analyzing these results.
View ProjectSpace Systems Design Studio
Cislunar Explorers
My work at Space Systems Design Studio (SSDS) involved working with Cislunar Explorer's satellite and ground station to make sure that the two were correctly performing their tasks. My efforts were initially devoted towards hardware, and thus I focused heavily on making sure our individual ground station components were working and testing the uplinking and downlinking processes between our model satellite (flatsat) and our ground station. Over time, I began moving more into software, initially working with registration key manipulation to fix our encryption scheme for downlinking and eventually moving onto the optical navigation subteam, where I worked on dynamic position estimation and testing for our satellite using unscented Kalman filters.
.png)
Spring 2022 End of Semester Report: Optical Navigation subteam
Encompasses work I did for optical navigation with a heavy focus on unscented Kalman filter analysis and unit testing.
View Project
Fall 2021 End of Semester Report: Communications subteam
Encompasses work I did for the ground station and telemetry for satellite uplinking/downlinking.
View Project