
Augmented Normalization: Differentiating the Generalized Geometric Median
September 2023-May 2024
We introduce Augmented Normalization (AugNorm), a plug-and-play normalization approach for deep neural networks that achieves comparable in-distribution test accuracy to BatchNorm while improving worst-case test accuracy under subpopulation shift.
View Project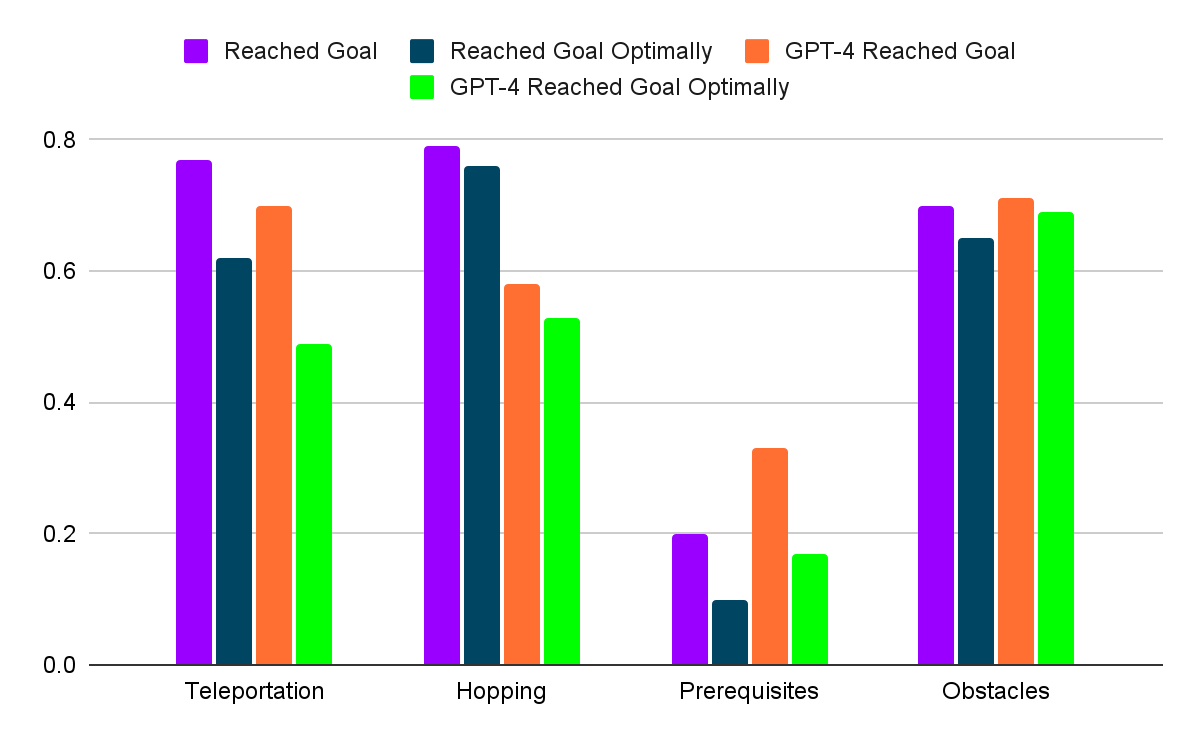
Benchmarking Large Language Models for Path Planning on Discrete Grids
October-December 2023
We explore the generalizability of LLMs on discrete path planning tasks, utilizing Chain of Thought reasoning and existing foundational models. These are finetuned on several novel discrete tasks, discussing trade-offs associated with each. Done as the final project for CS 6756 (Learning for Robot Decision Making).
View Project
LQR and iLQR for N-link Manipulators
September-December 2023
Implemented manipulator dynamics, LQR, and iLQR to control N-link manipulators. Done as the final project for ECE 6210 (Linear Systems).
View Project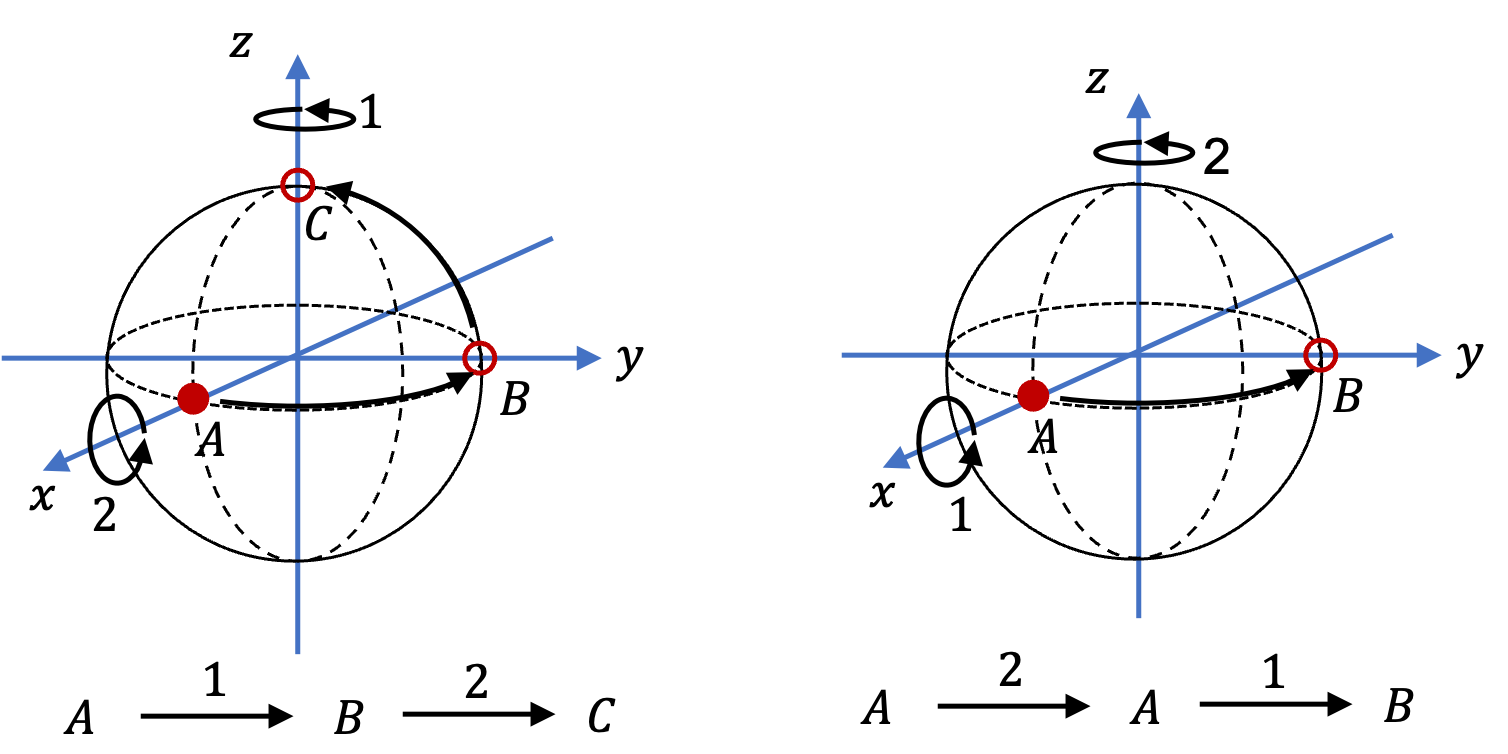
iQuHACK Hackathon Submission
January 2022
Created a mini-game that involves rotating 2-qubit statevectors into target statevectors using basic quantum gates. Implemented an adversarial mode (vs. a bot) with Deep Q-Learning.
View Project